Next: 2.3.4 体積に作用する力
Up: 2.3.3 表面に作用する力
Previous: 2.3.3.1 圧縮性流体(密度 [kg/m ]は変化する)
密度変化を考慮しないため、質量保存式(連続の式(2.38)
 )より
)より
 となり、式(2.65)
となり、式(2.65)
 は次のように表される。
は次のように表される。
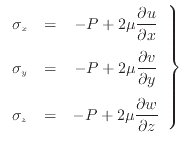 |
(2.76) |
 の式(2.77)
の式(2.77)
 と
と の式(2.66)
の式(2.66)
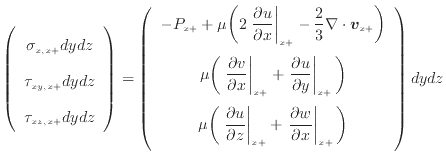
 から、それぞれの面に掛かる力を求める。力は外への方向が正となっている。
から、それぞれの面に掛かる力を求める。力は外への方向が正となっている。
 軸に垂直
軸に垂直  面左
面左-
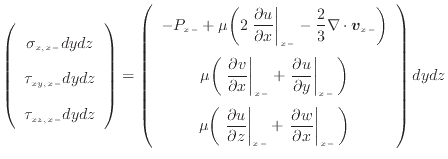 |
(2.77) |
-
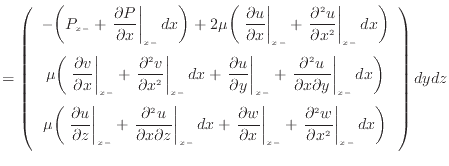
軸に垂直
面右
-
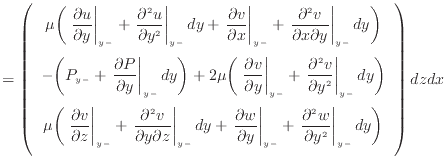
 軸に垂直
軸に垂直  面下
面下-
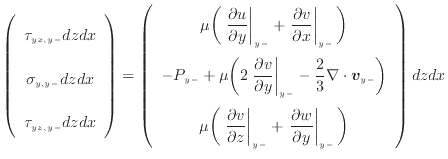 |
(2.79) |
-
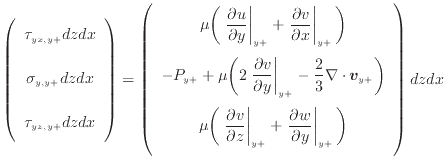
軸に垂直
面上
-
 軸に垂直
軸に垂直  面後
面後-
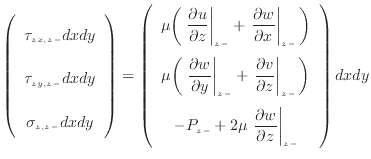 |
(2.81) |
-
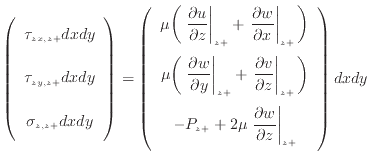
軸に垂直
面前
-
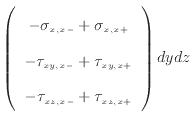
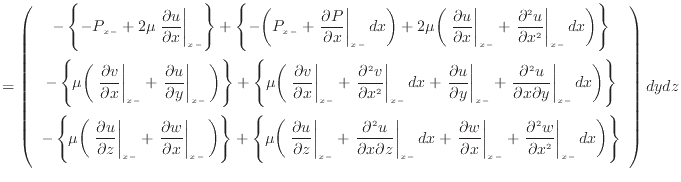
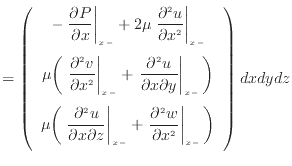
上六式から、まずそれぞれの軸に沿った作用を求める。 の各軸にそってコントロールボリューム内を正の方向へ加速させる力を正、負の方向へ加速させる力を負となるように符号を加え、向かい合う面を足し合わせる2.14。
の各軸にそってコントロールボリューム内を正の方向へ加速させる力を正、負の方向へ加速させる力を負となるように符号を加え、向かい合う面を足し合わせる2.14。
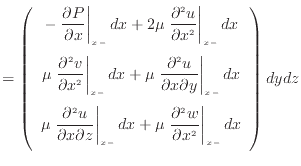
-
軸に沿った作用
 式(2.78)
式(2.78) 式(2.79)
式(2.79)
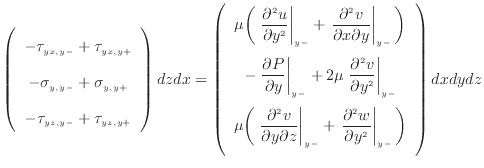
-
軸に沿った作用
-
式(2.80)
式(2.81)
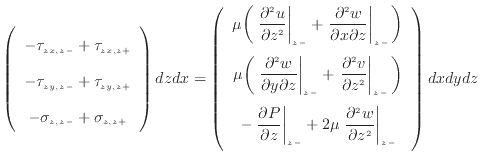
-
軸に沿った作用
-
式(2.82)
式(2.83)
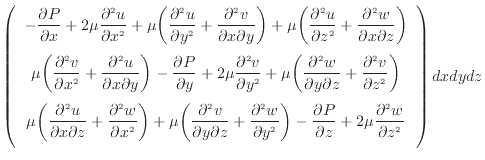
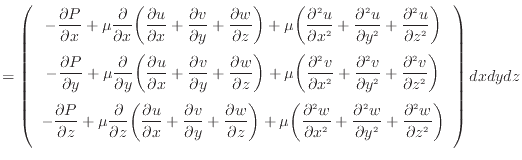
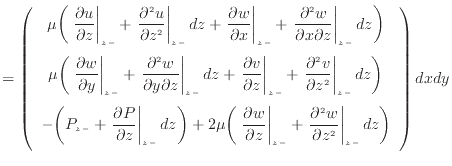
xyz軸での出入の総和、式(2.84)
式(2.85)
式(2.86)をとる。ここで、全ての項がコントロールボリュームの体積( )で括られているため各境界面での区別はせず(2.1.7節
)で括られているため各境界面での区別はせず(2.1.7節
 )、下付きを外す。コントロールボリューム全体での表面に作用する力は次式で表される。
)、下付きを外す。コントロールボリューム全体での表面に作用する力は次式で表される。
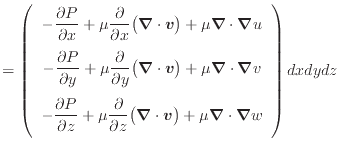
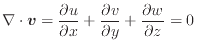
非圧縮性流体(密度 [kg/m
[kg/m ]は一定)では、式(2.38)
より
]は一定)では、式(2.38)
より
 であるので、次式となる。
であるので、次式となる。
Next: 2.3.4 体積に作用する力
Up: 2.3.3 表面に作用する力
Previous: 2.3.3.1 圧縮性流体(密度 [kg/m ]は変化する)
この図を含む文章の著作権は著者にあり、クリエイティブ・コモンズ 表示 - 非営利 - 改変禁止 3.0 非移植 ライセンスの下に公開する。